
👨🎓 About Me
I am currently pursuing my Ph.D. in the Elmore Family School of Electrical and Computer Engineering at Purdue University, under the supervision of Prof. Lingxi Li and Prof. Satish Ukkusuri. Prior to this, I received my Master’s degree from Shanghai Jiao Tong University (SJTU), under the guidance of Prof. Dewei Li and Dr. Yunwen Xu at CSC Lab.
My current research interests lie at the intersection of control, optimization, and learning, with their applications to cooperative driving automation, traffic control and intelligent transportation systems. If you share similar interests and have any interesting questions, feel free to email me 📬 at yang3062@purdue.edu!
🔥 News
- 2025.09: 🎉 My first-author paper has been accepted by IEEE-TITS.
- 2025.08: 🛫 Arrived in West Lafayette, IN — the Ph.D. journey begins!
- 2024.09: 🎉 My first-author paper has been accepted by IEEE-TITS.
📝 Publications
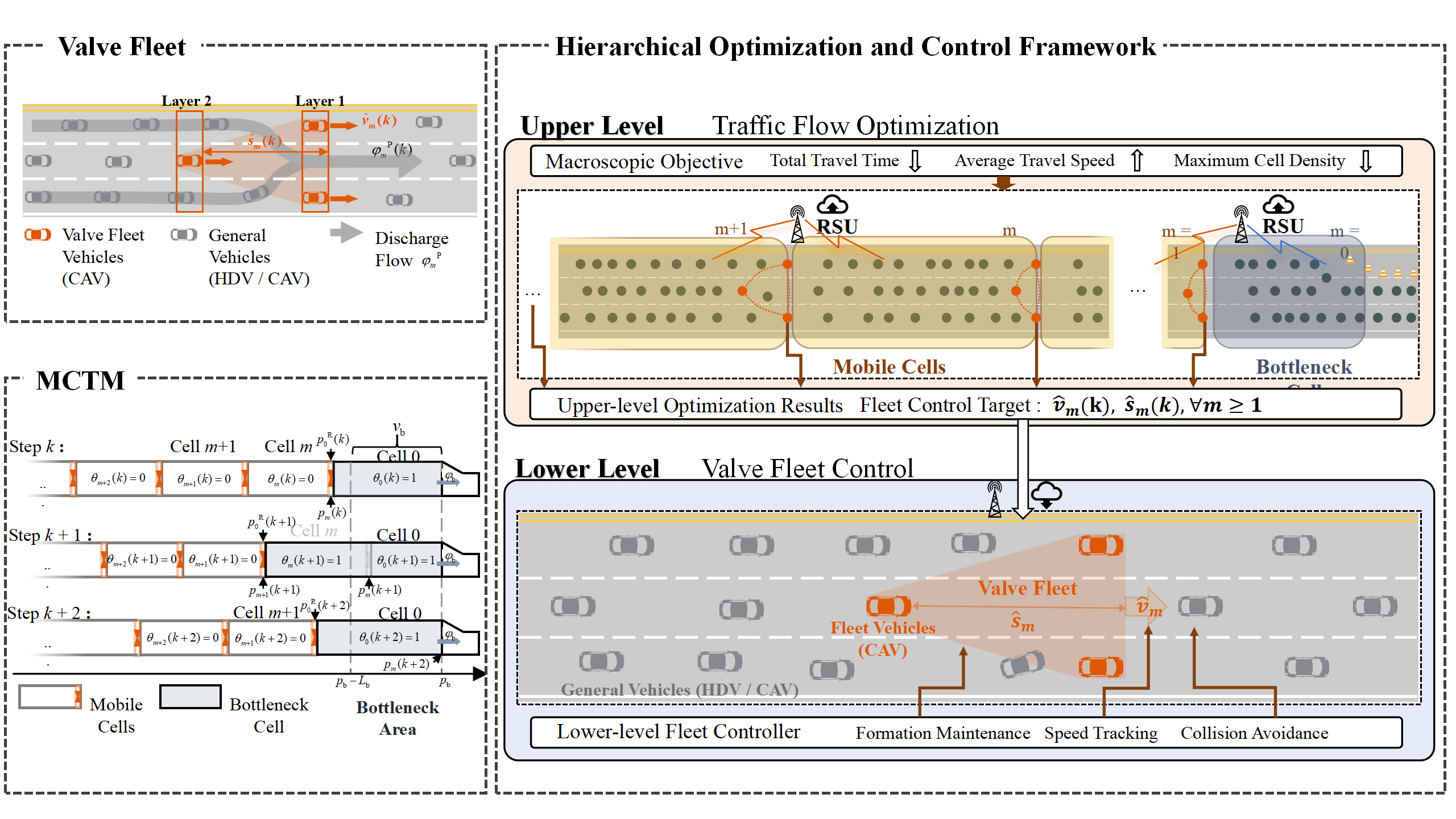
Siwen Yang, Yunwen Xu, and Dewei Li.
IEEE Transactions on Intelligent Transportation Systems, (IEEE TITS), 2025.
- proposed a mixed traffic flow control structure, utilizing multi-lane fleets composed of a small portion of CAVs in mixed flow as mobile actuators. Multiple fleets formed within the mixed traffic flow feature a novel structure and a valve-like function that regulates both traffic volume and speed, referred to as “valve fleets”, which are applied to decongest freeway bottlenecks.
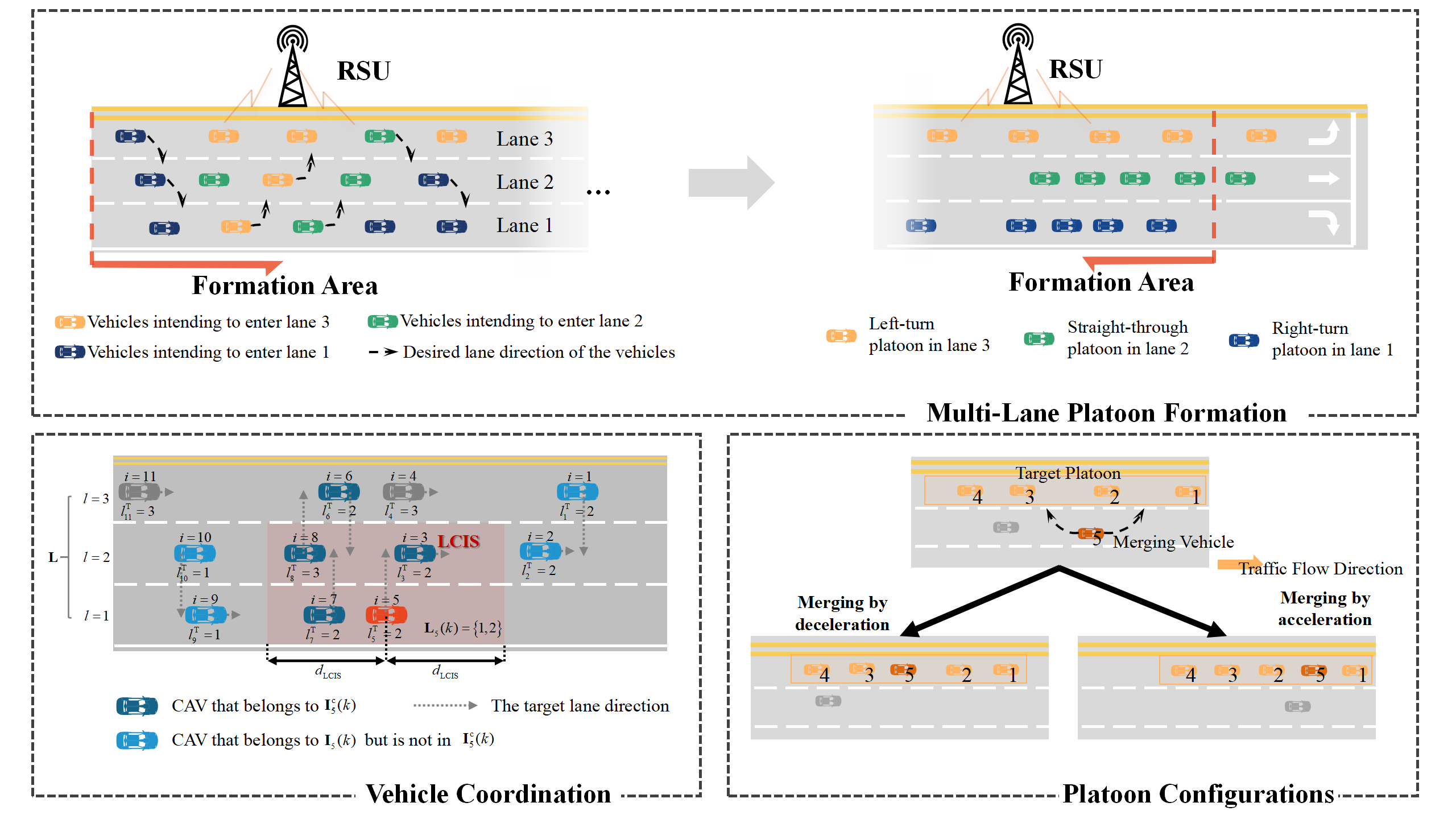
Siwen Yang, Yunwen Xu, Ping Wang, and Dewei Li.
IEEE Transactions on Intelligent Transportation Systems, (IEEE TITS), 2024.
- Proposed a multi-lane platoon formation scheme that coordinates the lane-changing decisions and longitudinal trajectories of CAVs to form platoons based on each vehicle’s target lane, aiming to reduce the negative impact of lane-changing maneuvers on traffic flow and improve platoon formation efficiency. The platoon configurations and vehicles’ motions are jointly optimizaed dynamically to enhance flexibility.
Trajectory Optimization for Multi-Lane Platoon Formation with Undefined Configurations,
Siwen Yang, Yunwen Xu, Dewei Li, and Chen Zhang.
IEEE 26th International Conference on Intelligent Transportation Systems (ITSC 2023) | Slides
- Proposed a trajectory optimization method for platoon formation that assigns and regulates vehicles distributed across different lanes into platoons with undefined vehicular sequences, aiming to reduce vehicle delays and time consumption.
📖 Educations
- 2022.09 - 2025.03, M.Eng. in Control Engineering, School of Electronic Information and Electrical Engineering, Shanghai Jiao Tong University, Shanghai, China.
- 2018.09 - 2022.06, B.Eng. in Automation, School of Automation, Central South University, Changsha, China.
💻 Experiences
- 2022.10 - 2023.12, “Development of MPC-based Heat Pump Controller and Thermal Comfort Algorithm for Electric Vehicles”, Collaborative Project between SJTU - CSC Lab and Thermalnology Hi-Tech Co., Ltd., Shanghai, China.